2017~2018
TEAM 01
海洋調査の完全な洋上無人化を実現する調査ソリューションの開発
代表:伊藤 昌平 株式会社FullDepth
構成機関
- 巻 俊宏 東京大学生産技術研究所
- 金澤 康樹 株式会社Naturanix
- 倉本 篤 株式会社アウトスタンディングテクノロジー
- 比江島 慎二 株式会社ハイドロヴィーナス
- 高満 洋徳 成光精密株式会社
開発テーマ概要
現在実施されている海洋調査は、事前に入念な計画を立て、大型の調査船に多数の専門家が搭乗して実施されるのが通例である。この方法のみに頼る場合、調査範囲が計画した海域に限定されること、悪天候等の影響で中断されうること、また燃料費や人件費等に大きなコストがかかること等により、調査の時間効率が低くなる。結果、特定海域について豊富な情報を得られる反面、広範囲の海底地形図作成は進んでいなかった。
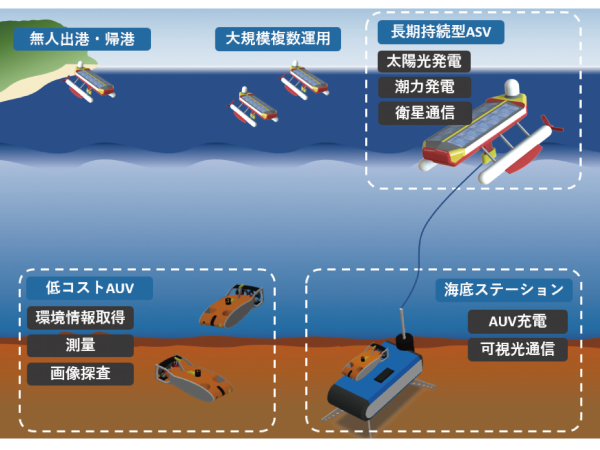
本チームが目指すのは、長期持続型完全洋上無人海洋調査ソリューションの開発だ。必要な電力を全て洋上発電(太陽光、海流、潮力発電)で担う、洋上自律探査機(Autonomous Surface Vehicle; ASV)と自律型無人潜水機(Autonomous Underwater Vehicle; AUV)、海中ステーション等で構成されたシステムの構想である。これらを小型、低コストで実現することで、従来型の“入念な準備を行い、調査する時だけ海に出る”方式ではなく、“常に無人での海洋探査が行われている”状態を作ることを目指す。
この壮大なビジョンの実現には相応の期間と海洋工学関連技術者の増加が必須であるため、まずは海中での自律運用、給電が可能な低コストAUV プラットフォームを開発するのが目標となる。
TEAM 02
音・光・生物を利用したリモートセンシングによる海底探査の実現
代表:笹倉 豊喜 株式会社アクアサウンド
構成機関
- 濱野 明 国立研究開発法人水産研究・教育機構水産大学校
- 佐川 龍之 一般財団法人リモート・センシング技術センター
- 田中 陽 国立研究開発法人理化学研究所
- 田中 信行 国立研究開発法人理化学研究所
開発テーマ概要
本チームがコアとするのは、超高速送信周期の超音波探査(ソナー)技術と、衛星画像から深度を推定する画像解析技術、そして海中生物を活用したバイオテレメトリー技術だ。
新開発のソナー技術は、従来は音波が海底に反射して戻ってくるまで次の信号を発振できなかったのに対して、戻るのを待たずに秒間数百回の発信が可能となる。これにより、中深層から超深海層を対象として、単位時間あたりのデータ収集量を飛躍的に増大することができる。音響解析が苦手とする浅海域に対しては、衛星画像を活用する。同一海域を写した複数の衛星画像を用いて色情報の分析を通じて深度推定を行うことで、船舶等を用いた探査をせずにマッピングを行うのだ。さらに、小型のピンガー、ロガーやMEMS 技術を用いて海中生物の行動パターンや生態、環境情報を取得する。初期の開発では、発電器官を持つ底生生物であるシビレエイを用い、無電源の生物エージェントとしての活用を検討する。これらにより、地形データに別レイヤーとして生態情報をマッピングすることを狙っていく。
今回のプロジェクト期間ではこれらの技術的実証やプロトタイピングを進め、将来的には漁船や商船が通常運行の中で精細な地形探査や周辺の生物情報の収集を行えるようにすることを目指している。

TEAM 03
機械学習による超解像技術を用いた海底地形データ詳細化
および深海測深支援システムの開発
代表:伊藤 喜代志 株式会社環境シミュレーション研究所
構成機関
- 飯山 将晃 京都大学
- 庄内 道博 エコモット株式会社
- 小澤 守 株式会社アーク・ジオ・サポート
- 松原 修 株式会社キュー・アイ
- 遠山 茂樹 東京農工大学
開発テーマ概要
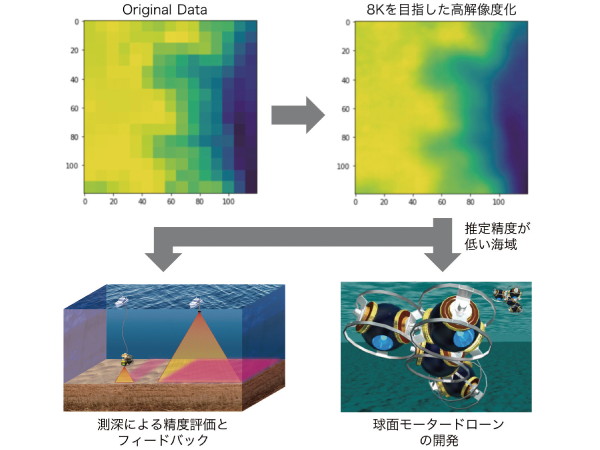
広大な海洋全体に渡って地形情報を取得するのに、そもそもすべてを探査する必要はなくなるかもしれない。本チームは、粗いモザイク画像から精細な画像を推定する“超解像技術”を活用して、測深精度の粗い海底地形データを画像と見なし、詳細化するシステムの開発を目指す。高精細な地形図が既にある海域を教師データとして、粗いマップから精細なマップを推定するアルゴリズムを開発する。これにより、地形特徴の似通った海底地形を自動的に高精度で推定することが可能となる。また推定精度が低い海域を判別するアルゴリズムも作ることで、AUV等による測深を重点的に行うべき海域を予測することができるはずだ。
本プロジェクトでは、これらのシステムを開発し、また実際に測深を行うことで超解像化の精度を評価する。推定精度が低くなったポイントについてAUV による測深を行い、得られた高解像度の海底地形画像を新たな教師データとしてフィードバックしていく。さらに将来的な測深の低コスト化や無人化を睨み、超音波球面モーター技術による球体ドローンの技術開発を進める。球体であることから耐圧性を高くできると期待され、深海域に対応可能な海中ドローンの新たなカテゴリの形成までも狙えるだろう。 これらにより、海底油田や鉱物資源開発の効率化およびコストダウンに貢献することを目指していく。