2020~2021
TEAM 01
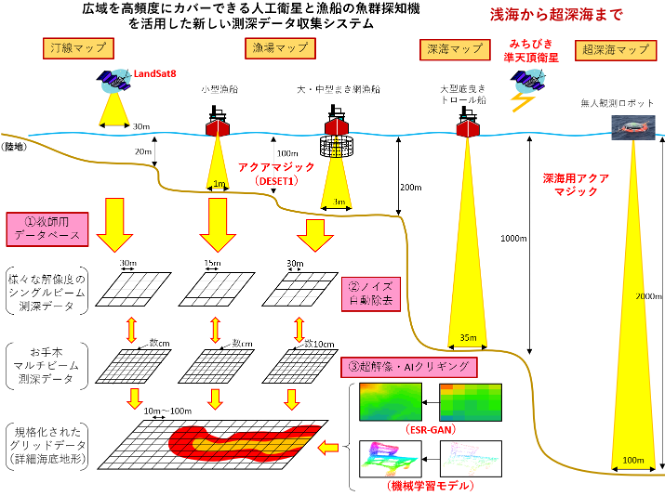
衛星とシングルビーム測深機及び人工知能を活用した
詳細海底地形図自動作成システムの開発
代表:笹倉 豊喜(株式会社AquaFusion)
構成機関
- 伊藤 喜代志(株式会社ブルーオーシャン研究所)
- 飯山 将晃(滋賀大学)
- 庄内 道博(エコモット株式会社)
- 小平 佳延(株式会社環境シミュレーション研究所)
- 奥村 俊夫(一般財団法人 リモート・センシング技術センター)
- 小澤 守(株式会社アーク・ジオ・サポート)
開発テーマ概要
低コストで広域を高頻度に測深できる人工衛星やシングルビーム測深機を利用した、測深データ自動収集システムを構築する。特にシングルビーム測深は、DeSET2017の成果である高速超音波発信機能を有するAquaMagicをベースに、みちびき準天頂衛星測位システムと連携して、水深3000mまでの深海域の高精度な測深機の開発を行う。そして、収集される測深データは、最新の機械学習技術を活用して高密度化し、地形図の自動作成を行う。これらシステム連携により、密度の異なる測深データを統一的に扱い、質の高い海底地形図の自動生成を狙う。実証実験として、20m以浅から2500mを超える超深海底で地形図作成を行い、測深精度や自動化の実用性を検証する。
TEAM 02
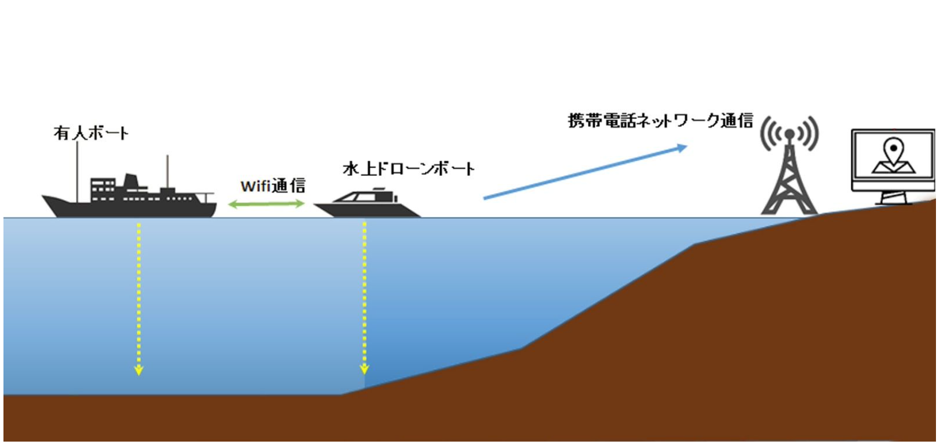
広域同時海底地形探査システムの構築
(Simultaneous Wide Area Sea Bottom Mapping System)
代表:松野 洋介(株式会社ライトハウス)
構成機関
- Randy Mackay(Japan Drones株式会社)
- 南 憲吏(島根大学)
開発テーマ概要
技術と専門性の高さから一部の調査員や研究者、大規模プロジェクトでしか実施することができなかった海底地形図作成を「民主化」することで、海の本来の魅力を引き出し「親しみやすさ」を付加していくことを目指す。この課題克服を目的としてドローンボートを用いた「広域同時海底地形探査システムを構築」するために、以下の開発提案を行う。一つ目が海洋域で水深を自律的に計測することのできるドローンボートの開発、二つ目が複数のドローンボートで得られる水深情報を自動統合するシステムの開発、三つ目が海底地形図の社会実装を目指した試験運用及びシステム改良の提案。複数のドローンボートの自律的な運用により本システムは、従来の調査で必要とされる時間、労力、費用を数分の一以下にまで大幅に軽減し、海底地形図作成のための全く新しい進歩的なシステムの実現を目指す。
TEAM 03
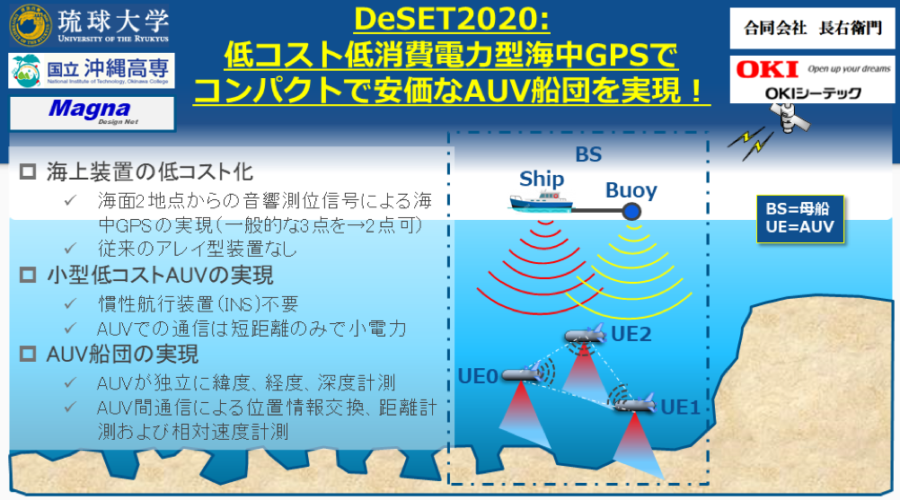
低コスト低消費電力型海中GPSで、コンパクトで安価なAUV船団を実現
代表:神山 一弘(株式会社マグナデザインネット)
構成機関
- 中川 重夫(合同会社長右衛門)
- 和田 知久(琉球大学)
- 板川 芳樹(株式会社オキシーテック)
- 鈴木 大作(沖縄工業高等専門学校)
開発テーマ概要
海洋平均深度は3000m以上で、深海底地図を高精度に取得するには、AUVによる海底スキャンが必要である。海中ではGNSSを利用することはできず、慣性航法装置やドップラーベロシティログによる速度計測を用いてその位置を把握するが、速度積分での距離累積やジャイロによる方向探知がベースであり、累積誤差が大きくなることと、そのような装置は大規模で電力消費も大きくAUVも大型・高コストになる問題がある。
本提案は海面母船とそれに曳航されるブイの2カ所から、GNSSによる位置と時間情報を含む信号を海中に強いパワーで送波し、①深海にある3台のAUVはその2種類の信号による距離測定、および圧力計による深度計測、②3AUV間の音響通信による距離制御を組み合わせて、各AUVに位置(緯度、経度、深度)を把握させ、小型低消費電力のAUV船団によるマップスキャンを可能とする。