2018~2019
TEAM 01
量産型海中・海底ステーションの構築
開発テーマ概要
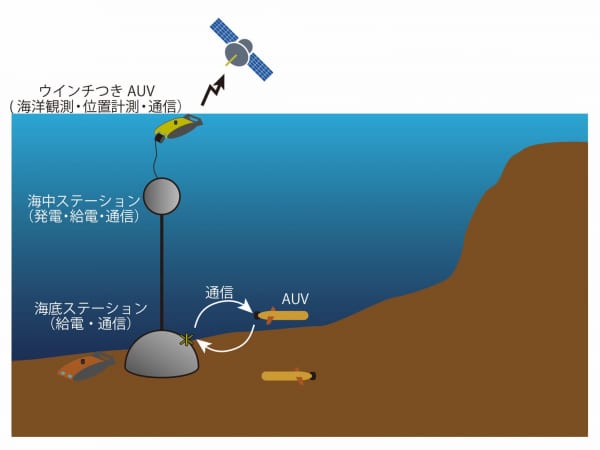
現在の自律型無人潜水機(AUV)を活用した測深データ収集では、AUVが定期的に母船に戻ってくるため、母船はデータ収集が完了するまでその海域にとどまる必要がある。データ回収や給電のためのスポットをその海域に切り離すことができれば、その必要がなくなり、データ収集を加速させられる。チームでは、海底と海中にハブとなるステーションを設置し、そこでデータ収集とAUVの給電を行うというプランを策定した。母船は観測スポットにステーションを設置してくるだけで、自律的にデータが集められる。
ステーションの建造には、圧縮強度の強さやコスト、劣化性、リサイクルの観点などから、海中建造物の素材としてコンクリートが適しているという仮説を立て、3Dプリンタを用いたコンクリート建造物製造技術の開発と実証を目標として掲げている。
具体的に開発を目指すのは、3次元モデルデータから鉄筋やコンクリートの造形が可能な一連のシステムだ。さらに、それを海中・海底ステーションとして機能させるため、耐圧樹脂を利用した各種電子機器の防水化、AUVとのドッキング機構、新規のコイルアンテナによる通信と組み合わせ、実海域での検証を行うことを狙う。将来的には、これらの技術による安価な海中・海底ステーションを各海域に設置することで、準リアルタイム測定による地震観測網の整備、精細な海底地形の作成および生物生態の観測、新たな海中空間利用の拠点化に役立てようと考えている。
TEAM 02
AUV・生物を使ったマルチプラットフォームによる
測深・環境・生態観測システム
開発テーマ概要
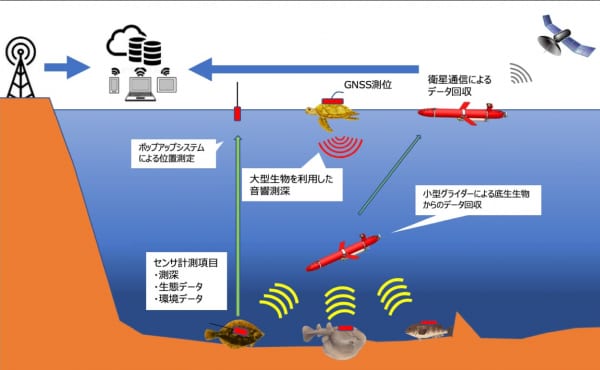
生物に様々なセンサを搭載した記録計(ロガー)を装着し、生物の行動をトラッキングする“バイオロギング”という技術がある。本チームは、これを測深に応用しつつ、従来の弱点であるデータ回収効率の悪さを解決する技術の開発を目指す。
エイやカレイなどの底生生物に、深度、水温・塩分・溶存酸素等の環境データ、加速度等を取得できるセンサを搭載したロガーを装着させる。これらのデータ回収のために通常は装着生物ごと捕獲を試みるが、本チームは、海中を自律航行する小型水中グライダーを使って生物に接近させ、音響通信を通じてロガーからデータのみ回収するモデルを考案した。ここで、大海原からグライダーが潜るべき位置を特定するのは困難だが、ロガーに付帯させるポップアップタグによって解決を目指す。ポップアップタグが自動的に切り離されて水面に浮上し、衛星通信を介して目的とする底生生物の位置を水中グライダーに知らせるのだ。さらに、海への廃棄物を減らすために、ロガーの自動切離システムで、水面に浮上させ、自律型洋上探査機(ASV)等を用いた回収へも挑戦する。また、海中で生活するウミガメなどの大型生物に、ロガーや小型の音響測深装置を装着してデータ取得するアプローチも盛り込んだ。このようにして、海洋生物という自らのエネルギーで移動するモバイルプラットフォームを利用した、世界初の測深技術の確立を目指している。
TEAM 03
海底AIマップ作成オープンプラットフォームの構築
開発テーマ概要
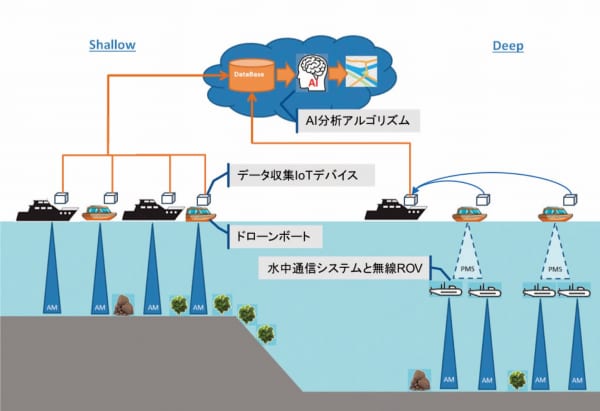
本チームの特徴は、漁船やオープンソースデバイスを活用しながら、誰でも海底に関するデータ収集に参加できるプラットフォーム構築を目指している点だ。その収集データを基に、AIを活用して水深および底質に関する詳細な地図を自律的に作成していく。
これまで、海底探査は専門の技術を持った研究機関や調査会社に委ねられてきた。大型の調査船を運用し、ソナーによる探査で得たデータを解析して地形図にする、というのが従来の方法だ。これに対して本チームでは、魚群探知機からデータ収集できるIoTデバイスとオープンソースの小型ドローンボートを組み合わせ、小型漁船やレジャーボートもフル活用した浅海域でのデータ収集の仕組みを整える。また、深海域においては安価な無線ROVと水中通信システムをそれぞれ開発し、前述のドローンボートと複数の無線ROV艦隊を協調稼働させることで効率的なデータ取得に挑む。
浅深海域でそれぞれ収集したデータは、独自開発するAI分析アルゴリズムを介して、水深だけでなく藻場や魚群などの底質情報を同時に得られるようにシステム開発を行う予定だ。ユーザーメリットを提示し、海底地形図作成を民主化することで、より高速、高効率、広範囲、低コストの地形図作成を推し進める。同時に、海底地形のデータを基盤として、産業価値のある水産資源の分布や安全性の高い航路情報、海洋気象情報等との連結を図り、海に関する広大な知識を提供することで、人々に海をより親しみやすく感じてもらうことを狙っている。